

Naukowcy z Politechniki Wrocławskiej pracują nad bioniczną protezą ręki przeznaczoną dla osób z jednostronną lub dwustronną amputacją na poziomie przedramienia. Może wykonywać różne ruchy chwytne oraz manipulacyjne i jest sterowana przy pomocy biosygnałów.
– Proteza o nazwie BEEPP (Bionic, Ergonomic, Economic, Polish Prosthesis) jest złożoną strukturą składającą się z kilku przenikających się systemów, w tym medyczno– rehabilitacyjnego, informatycznego, mechanicznego, elektronicznego i robotycznego – mówi dr inż. Andrzej Wołczowski, kierownik projektu realizowanego w Centrum Innowacji i Biznesu PWr.
Urządzenie waży ok. 500 g, a jego maksymalna siła uchwytu wynosi ok 100 N. Dłoń ma dziewięć aktywnych stopni swobody (niezależnie napędzanych przegubów-stawów ręki) i jest sterowana biosygnałami pobieranymi nieinwazyjnie bezpośrednio z kikuta protezowanej kończyny, co pozwala na bardziej naturalne, niż w obecnych na rynku rozwiązaniach komercyjnych, sterowanie ruchami protezy.
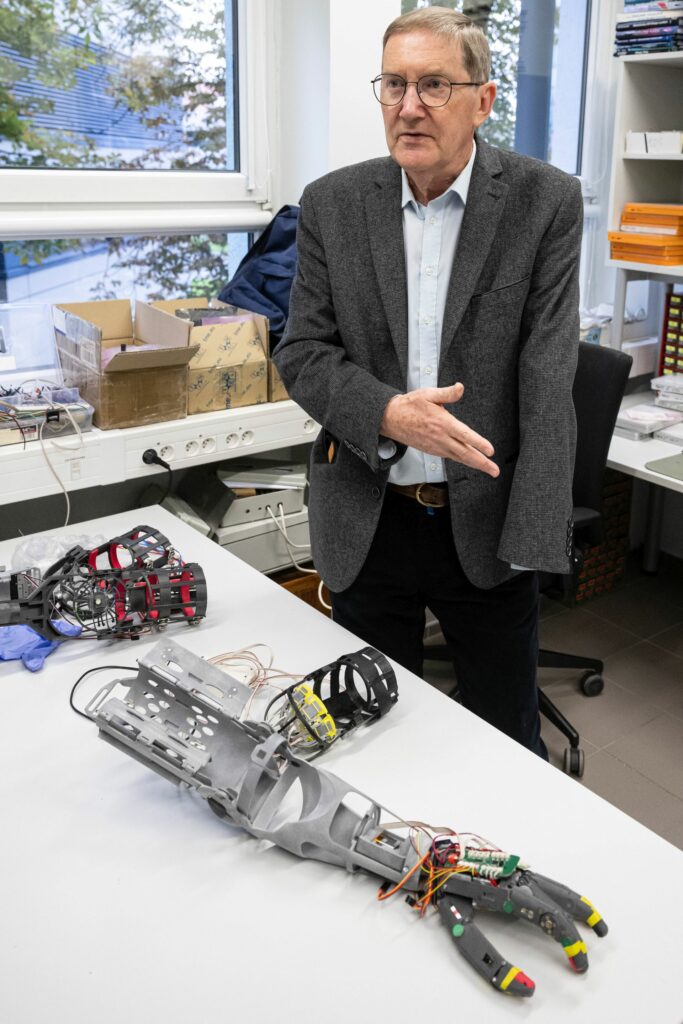
Cześć mechatroniczna protezy obejmuje aktywną ortezę łokcia, stanowiącą zarazem interfejs mechaniczny łączący protezę z kikutem przedramienia i pozycjonujący elektrody systemu pomiaru biosygnałów na kikucie protezowanej kończyny, mechaniczne przedramię zakończone aktywnym nadgarstkiem, które integruje system zasilania i pokładowy system mikroprocesorowy (interpretujący komendy systemu bionicznego i sterujący kinematyką protezy) oraz pięciopalczastą rękę z sensorami kontaktu z chwytanym przedmiotem.
Elementy mechaniczne protezy – obejma ramienia, przedramię oraz dłoń – zostały wykonane całkowicie w technologii druku proszkowego 3D z tworzywa PA12. Naukowcy rozważają połączenie tego rozwiązania z technologią odlewania precyzyjnego ze stopu magnezu. Połączenie tych dwóch pomysłów pozwoli docelowo na szybką personalizację wytwarzanych protez.
Proteza jest przeznaczona dla osób z jednostronną lub dwustronną amputacją ręki na poziomie przedramienia (tzw. amputacja transradialna). Projekt zakłada, że będzie możliwa jej personalizacja ze względu na rodzaj amputacji: prawa/lewa kończyna, kształt kikuta oraz posturę ciała pacjenta – w zakresie rozmiarów aktywnej ortezy łokcia, mocowania systemu pomiaru biosygnałów na kikucie, przedramienia – oraz samej ręki w dwóch lub trzech rozmiarach.
– Największym wyzwaniem w przygotowaniu protezy było właściwe opracowanie trzech kluczowych podsystemów, których odpowiednie działanie rzutuje na komfort użytkownika. Chodzi o interfejs (zarówno mechaniczny, jak i elektroniczny) protezy z pacjentem, algorytmy sztucznej inteligencji rozpoznające intencje pacjenta co do ruchu protezy oraz mechatroniczną strukturę samej dłoni. Wszystkie mają kluczowe znaczenie dla niezawodności, funkcjonalności oraz wygody codziennego stosowania protezy – podkreśla dr inż. Andrzej Wołczowski.

W skład zespołu projektowego weszło w sumie dwanaście osób z PWr – w tym m.in. informatycy, mechanicy, elektronicy oraz automatycy i robotycy. Poza pracownikami naszej uczelni w realizację projektu był także zaangażowany specjalista w zakresie chirurgii i rehabilitacji z Uniwersytetu Medycznego we Wrocławiu, specjalista biomechanik z Politechniki Warszawskiej oraz firma protetyczna Ortopes, wspomagająca projektowanie elementów interfejsu protezy z pacjentem.
Teraz konstruktorzy przygotowują się do testów z pacjentami, które zaplanowano na koniec tego roku.
Osoby po amputacji ręki zainteresowane udziałem w badaniach proszone są o kontakt z kierownikiem projektu dr. inż. Andrzejem Wołczowskim.
Nadesłane: Michał Ciepielski, Politechnika Wrocławska




